I. Introduction à Linux, ROS et ROS-I
Prérequis
- Lycée et +
- Notions de programmes informatiques, terminaux et commandes
Diapositives
1. Démarrer Ubuntu et ROS
Selon votre situation, une clé USB bootable nommée "clé Live" peut vous être fournie.
Cas 1.A : Une clé USB bootable m'est fournie
Vous devez faire "booter" votre poste de travail sur la clé USB Live fournie en vous aidant si nécessaire de la procédure dédiée.
Votre clé est fournie avec tous les paquets préinstallés pour le workshop. Ainsi, dans les TP vous devrez sauter toutes les étapes précédées du pictogramme "disque" suivant : 📀 car ces étapes ont déjà été réalisées.
Localisez l'application "Terminator" sur votre clé USB Live puis passez directement au titre 2. ci-dessous dès que vous avez réussi à ouvrir un terminal.
Cas 1.B : Je n'ai pas de clé USB bootable, j'installe Ubuntu et ROS moi-même
Installez Ubuntu 20.04 et ROS Noetic selon les prérequis. Vous aurez également à installer vous-même des éléments supplémentaires tout le long des travaux pratiques : ces étapes d'installation sont signalées par un pictogramme "disque" 📀. Nous recommandons l'installation et l'usage de Visual Studio Code comme environnement de développement intégré (optionnel).
Les utilisateurs dans le cas B doivent également configurer leur environnement ROS :
- 1.B.1. en créant un espace de travail dédié à ROS : tous vos packages ROS se trouveront dans le dossier
srcde l'espace de travail nommécatkin_ws:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws
source /opt/ros/noetic/setup.bash
catkin_make
- 1.B.2. en plaçant les lignes suivantes à la fin du fichier
~/.bashrc(commentaires compris) :
# ROS workspace
source /opt/ros/noetic/setup.bash
source ~/catkin_ws/devel/setup.bash
#export ROS_HOSTNAME=$(hostname).local
export ROS_IP=`ip address|grep inet|grep dynamic|tr ' ' ':'|cut -d':' -f6|cut -d'/' -f1|head -n1`
export TURTLEBOT3_MODEL=burger
# CHOOSE A ROS MASTER: local host, Poppy robot or Turtlebot robot
# Add # in front of the lines that you want to disable
ROS_MASTER_URI=http://localhost:11311
#ROS_MASTER_URI=http://poppy.local:11311
#ROS_MASTER_URI=http://raspberrypi.local:11311
- 1.B.3. en fermant et rouvrant votre terminal. Vous ne devez visualiser aucune erreur lors de la réouverture du terminal et devez pouvoir taper la commande
roscoresans erreur (tapez Ctrl+C pour quitter roscore).
Cette configuration est partiellement expliquée dans les diapositives. Pour plus d'information, référez-vous à la documentation ROS concernant la configuration de l'environnement ROS.
2. Prise en main du terminal : le rosier 🌹
⌨️ Pour prendre en main le terminal Linux et les commandes de base, à partir d'un terminal, créez les fichiers et dossiers nécessaires pour réaliser cette hierarchie de fichiers ressemblant à un rosier :
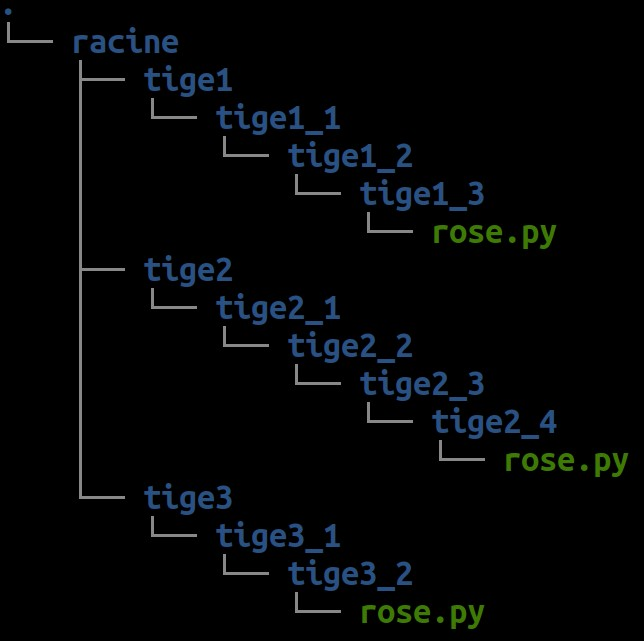
Vous aurez besoin des commandes suivantes :h
ls, pour lister les fichiers et dossiers courantscd, pour changer le dossier courantmkdir, pour créer un nouveau dossiertouch, pour créer un nouveau fichier videnano, pour créer un nouveau fichier et écrire à l'intérieurtree, pour afficher la hierarchie de fichiers
3. Tutoriels
🧑🏫 Vous êtes désormais prêt à utiliser ROS ! Suivez les tutoriels ROS suivants pour découvrir et tester les concepts de base, sachant que votre distribution ROS s'appelle noetic :
- Understanding ROS Nodes : Maîtriser ROS master (
roscore) et lancer des nœuds (rosrun) - Understanding ROS Topics : Envoyer et recevoir des messages dans un topic (
rostopic) - Understanding ROS Services and Parameters : Déclarer et appeler un service requête/réponse (
rosservice,rossrv)
❓ Quizz : quizz au tableau pour mémoriser les commandes importantes
4. ⚙️ Préparer vos robots
Pour l'un ou l'autre de vos 2 robots, réalisez les étapes de préparation suivantes expliquées dans la FAQ robots :
- Flasher sa carte SD
- Connecter le robot en wifi
- Se connecter via SSH au robot
- Personnaliser le nom de votre robot (si nécessaire)
5. FAQ
📥 Mise à jour pendant le TP
Il se peut que l'enseignant mette à jour les ressources pendant le cours. Dans ce cas exécutez les commandes suivantes pour récupérer les dernières mises-à-jour :
roscd ros4pro
git pull origin poppy_tb3_keras
Si l'erreur suivante survient :
error: Vos modifications locales aux fichiers suivants seraient écrasées par la fusion :
<LISTE DE FICHIERS>
Veuillez valider ou remiser vos modifications avant la fusion.
Abandon
Alors les fichiers spécifiés ne peuvent pas être mis à jour car cela détruirait les modifications que vous avez apportées à la liste des fichiers indiquée. Il est recommandé de demander conseil avant d'essayer une autre action pour récupérer la mise à jour.









📚 Auteurs
Jessica Colombel (Inria), Jean-Luc Charles (ENSAM), Rémi Fabre (CATIE), Jean-Baptiste Horel (CATIE), Yoan Mollard (Bordeaux INP), Alexandre Péré (Inria), Steve N'Guyen (LaBRI) .
💬 Besoin d'aide ?
Posez votre question sur le forum francophone des utilisateurs de ROS.
📅 Dernière mise à jour : 3/30/2021, 9:06:30 PM